LBL Solutions
Get more information with
Viktor Stark
Product Manager
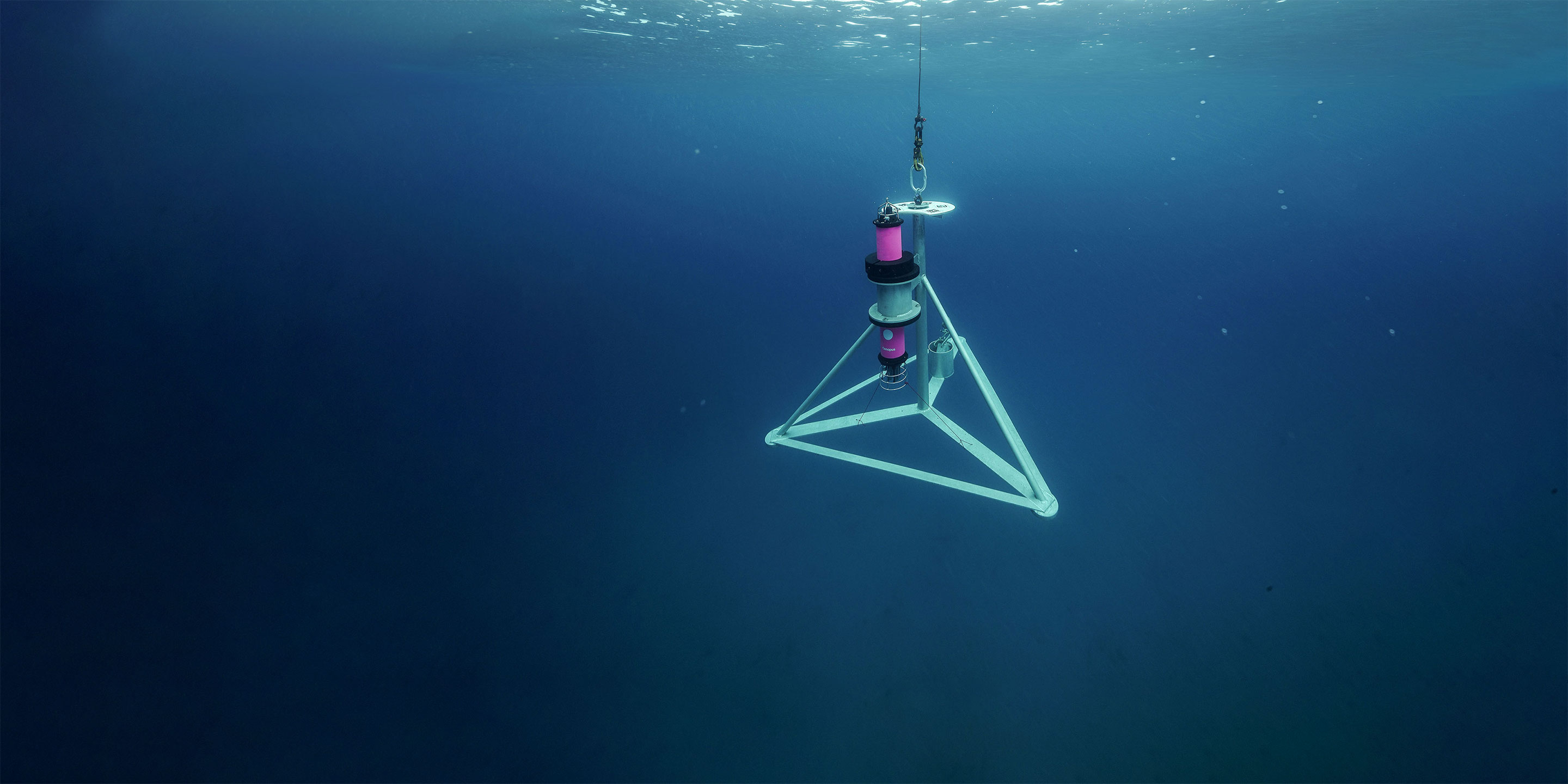
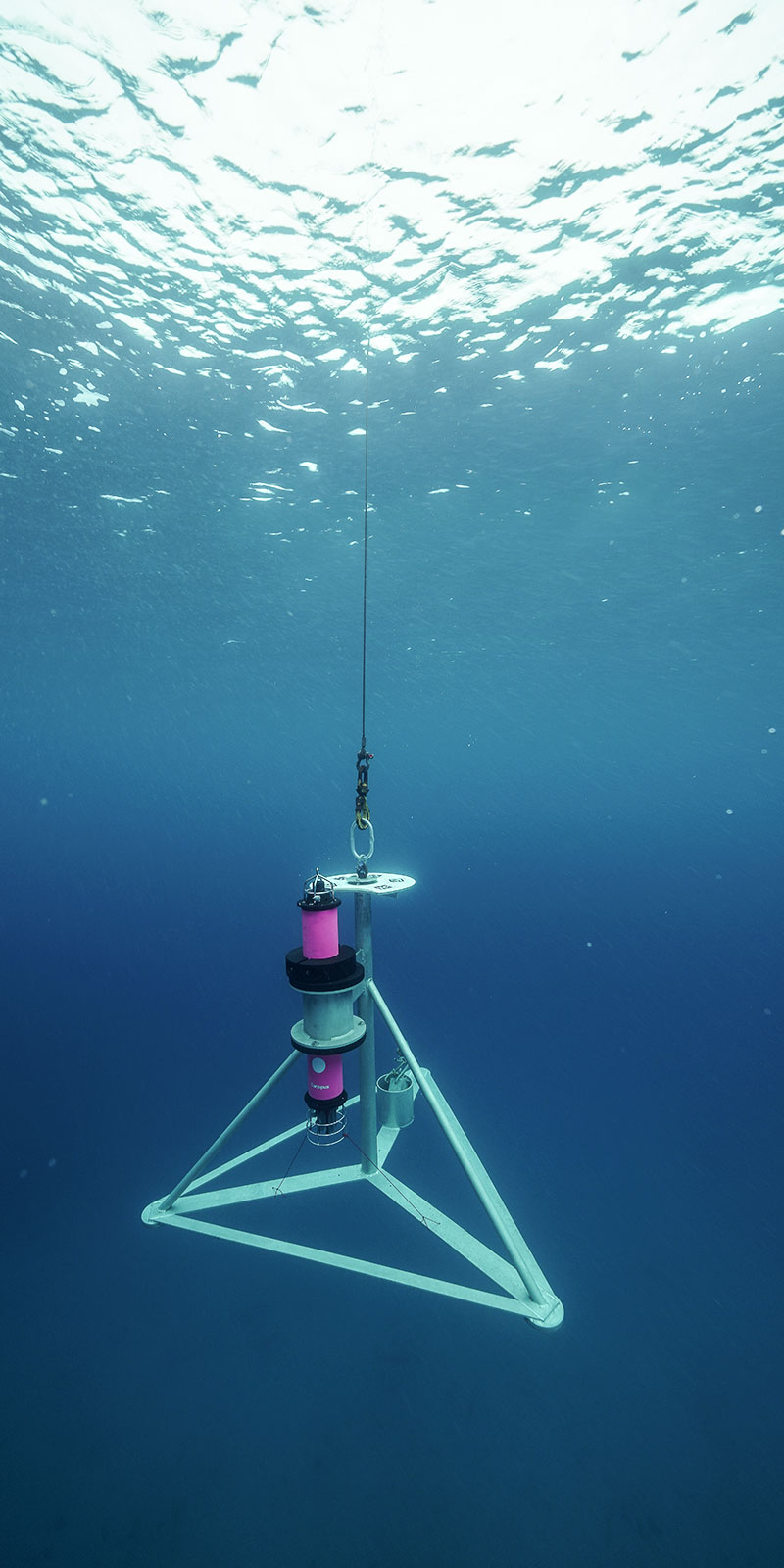
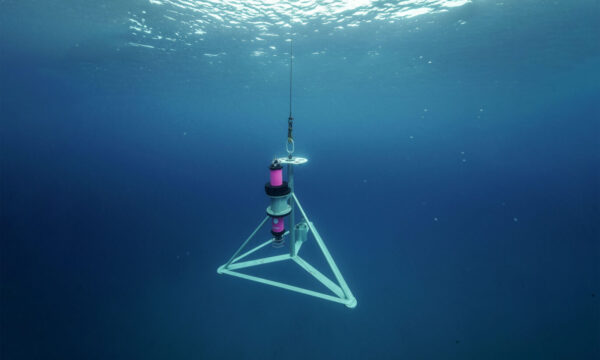
iXblue LBL subsea positioning technology is a simple cost-efficient solution that provides highly performant subsea positioning and monitoring capabilities down to 4,000m. Bringing together Canopus intelligent transponders, Ramses transceivers, Inertial Navigation Systems and Delph Subsea Positioning Software, it offers advanced sparse LBL capabilities that allow operators to reduce the number of transponders deployed on the seabed with no compromise on performance.

|

|
|
|---|---|---|
| Depth rating | 4,000 | 4,000 |
| Accuracy (mm) | < 10 | < 10 |
| Autonomy (pings at max sound level) | n/a | 2,800 000 (alkaline) |
| Transducer beam shape | Omnidirectional | Omnidirectional |
| Acoustic communication | 500 bps / 3kbps | 500 bps / 3kbps |
| Data logging (Gb) | 32 | 32 |
| Ask for quote | Ask for quote |
|
|
|
|
|---|---|---|
| Depth rating | 4,000 | 4,000 |
| Accuracy (mm) | < 10 | < 10 |
| Autonomy (pings at max sound level) | n/a | 2,800 000 (alkaline) |
| Transducer beam shape | Omnidirectional | Omnidirectional |
| Acoustic communication | 500 bps / 3kbps | 500 bps / 3kbps |
| Data logging (Gb) | 32 | 32 |
| Ask for quote | Ask for quote |
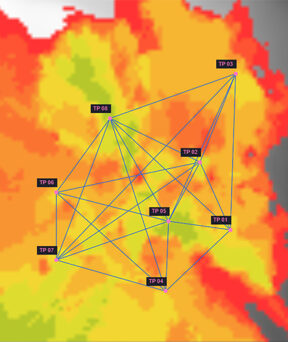
Sparse-LBL: reduced transponders for higher accuracy
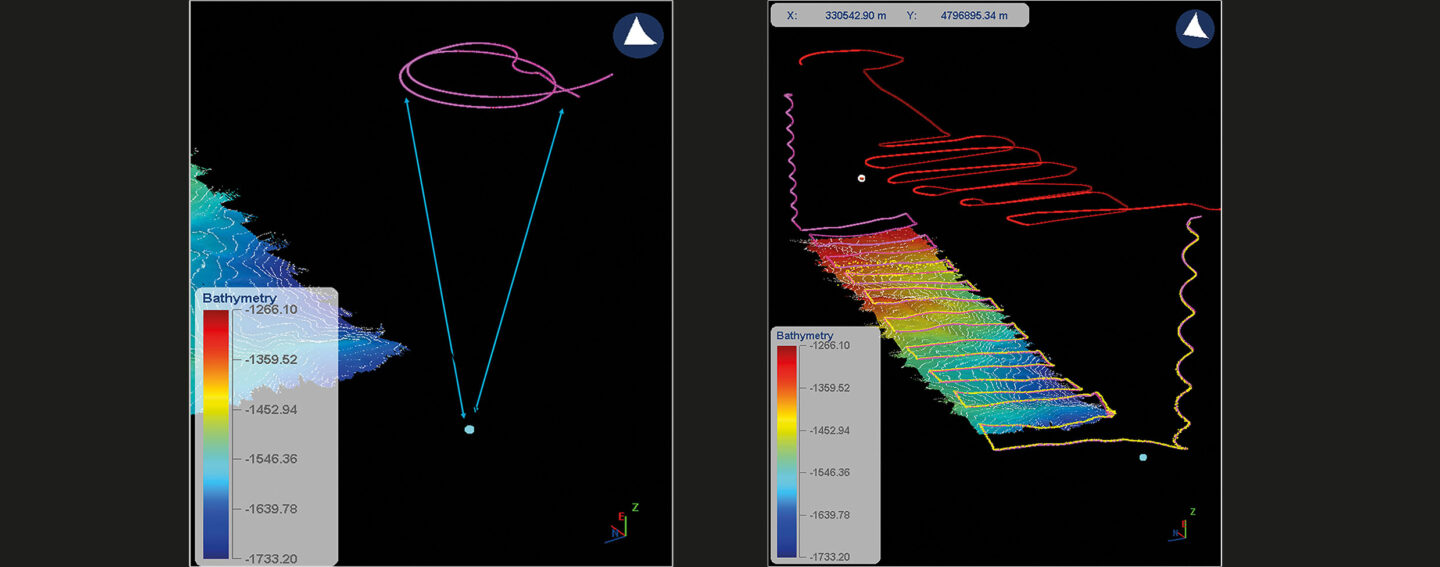
When coupled with inertial navigation systems (INS), the use of iXblue Ramses transceiver offers even greater accuracy and reliability thanks to the tight coupling of acoustic and inertial technologies. This is iXblue concept of “Sparse-LBL”, that powers cost-efficient subsea operations by reducing the number of transponders deployed on the seabed, thus decreasing the time spent on transponder deployment, calibration and maintenance.

The following table gives the performance that can be reached depending on the number of transponders used:

Embedded Environmental Sensors
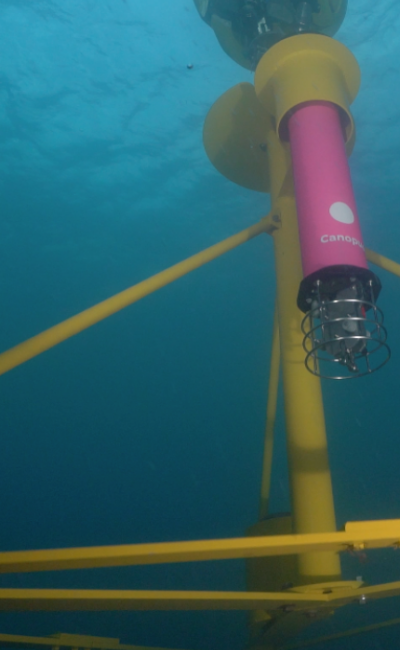
On top of featuring underwater acoustic communication between transponders and transceivers, Canopus and Ramses embed their own environmental temperature, pressure and inclinometer sensors. Canopus transponders can further be enhanced with other optional sensors such as Digiquartz depth sensor, sound velocity sensor or other external sensors for increased operational efficiency.
While able to send all recording to the surface in real-time thanks to a robust and reliable acoustic link, both Canopus transponder and Ramses transceiver offer a data logging feature that allows the recording of internal or external sensors on the beacon internal memory for more occasional data retrieval.
A user friendly LBL solution
A third-party friendly positioning solution
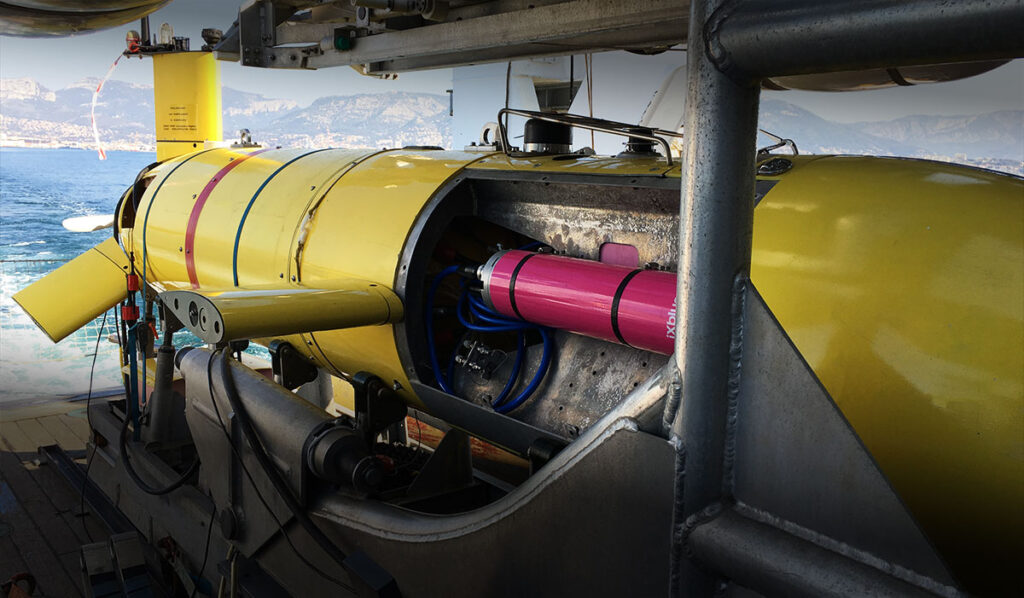
The Canopus LBL transponders and Ramses LBL transceivers offer inter-beacon and inter-product acoustic communication and are compatible with all major third-party acoustic positioning solutions used on the market. This makes them easy to add on existing fields of operation and existing pool of equipment.
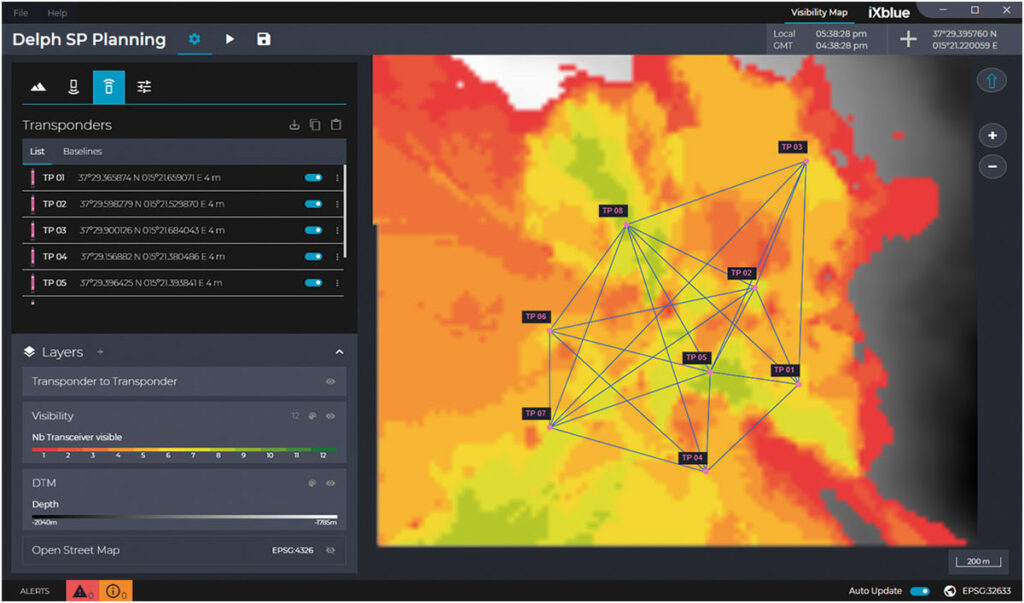
An efficient Supervision Software Suite
To manage the increasing complexity of subsea operations and to offer a solution that is easy to deploy and use, iXblue developed a global supervision software that integrates the full range of iXblue subsea systems: Delph Subsea Positioning Software. An intuitive and dynamic software used to plan, operate and post-process iXblue subsea positioning products, Delph Subsea Positioning (Delph SP) simplifies the planning, simulation, operation and post- processing of subsea positioning tasks. Comprising three intuitive and user-friendly core modules, Delph SP is an easy-to-use yet powerful tool enabling even the most complex subsea operations by making each step of the subsea positioning operation simpler, error-free and faster, saving vessel and man time.
Learn more about Delph Subsea Positioning
Remotely controlled operations
iXblue solutions being based on web technologies, the whole Canopus, Ramses and Delph Positioning Software ecosystem can be remotely controlled using a low bandwidth satellite communication link.
A “remote access kit” gives surveyors and support engineers remote control over the whole solution by directly accessing the devices IP addresses. A solution that, contrary to simple screen sharing or remote desktop access, requires less data to be transferred over the satellite communication link.
News & Customer Stories
-
 14 Nov 2023
14 Nov 2023- Maritime
Exail and Kongsberg Discovery achieve full compatibility for Long Baseline (LBL) positioning solutions, enhancing underwater operations
Exail and Kongsberg Discovery are pleased to announce their successful collaboration in the field of Long Baseline (LBL) subsea positioning solutions. Since June 2023, Kongsberg…Learn more -

- Maritime
Exail as top choice for underwater equipment rental companies
Exail had record years in 2022 and 2023 in the rental market, securing multiple contracts with rental companies globally. With the objective of providing their…Learn more -
- Maritime
From de-risking to value creation: First Canopus & Ramses LBL solutions deployment on an O&G project
Deploying a new technology for the first time is always challenging. But, with careful planning, teamwork and a drive to deliver customer satisfaction, these challenges…Learn more -
7 Oct 2021
- Maritime
UTEC operates new iXblue subsea positioning technology on challenging ultra-deep water construction project
iXblue sparse LBL solution provides more informative positioning and spool piece metrology at multiple drill centers throughout the project execution.Learn more -
28 Oct 2020
- Maritime
Great success for Canopus systems deployed in Sicily for the Focus Project
8 Canopus transponders have been deployed for the geodetic network of the Focus project, in Sicilian waters at the foot of the Etna Volcano.Learn more -
- Maritime
Bringing operational efficiency to the Energy industry
Learn more -
- Maritime
iXblue new global subsea positioning system chosen by leading european institute for geodetic mission off the coast of Sicily
Learn more -
28 Aug 2019
- Maritime
iXblue new global subsea positioning system chosen by leading European institute for geodetic mission off the coast of Sicily
Learn more -
3 Dec 2018
- Maritime
iXblue launches new global subsea positioning system named Canopus
It comprises iXblue new intelligent transponder, Canopus, the next generation of Ramses transceiver, and upgraded existing iXblue products with a new telemetry function, as well…Learn more -
26 Apr 2017
- Maritime
iXblue completes Ramses mass training session in Aberdeen
Learn more -
4 Mar 2017
- Maritime
3D at Depth and iXblue develop inertial navigation system aided LiDAR data collection technology for subsea applications
Initial Deep water Trial Demonstrates Time Saving for High-Resolution Subsea Mapping and MetrologiesLearn more