- Maritime
A telescope to listen to the universe

iXblue recently took part in the deployment of a major submerged telescope off the coast of Toulon, the purpose of which is to observe particles from space which are quasi-undetectable in terrestrial environments. We take a closer look at this unusual project, which proves that underwater acoustics can achieve pretty much anything.
The European project KM3NeT (Kilometer Cube Neutrino Telescope), in which iXblue has been involved for many years through the pilot project ANTARES, is one of those missions which allows acoustic positioning to flirt with research in fundamental physics. Bringing together a whole host of institutes of physics, astronomy and oceanography from all over Europe, this project aims to deploy networks of sensors on several sites in the Mediterranean off the coasts of France, Italy and Greece. Precisely distributed according to predefined schemas, these networks of photosensitive underwater sensors come together to form telescopes that make it possible to observe particles in space which are quasi-undetectable in terrestrial environments: namely, neutrinos.
Discovered in the middle of the 20th century, these elementary particles are at the heart of the research being conducted within the framework of some of the largest experiments in fundamental physics on Earth. While the heavens have always been observed with the help of photons emitted by celestial bodies, the intrinsic properties of neutrinos make them excellent indicators of the most distant events in the cosmos. After all, the neutrino is stable and neutral, meaning there is no risk of it disintegrating during its journey or being deviated by magnetic fields. It is therefore possible to approximately locate the direction of its source; moreover, its low interaction cross-section means it is able to pass through dense zones of the Universe, such as at the edge of black holes or cataclysmic phenomena; lastly, it carries information about the nuclear phenomena at its source. These exceptional properties will ultimately also make it possible to observe the skies more efficiently, but also to locate more precisely the sources in space.
The counterpart to this relatively furtive nature of the neutrino is that it is difficult to detect… How is it possible to precisely observe a particle which interacts so little with its environment? The answer to this question is: you “simply” use the Earth as a target! Indeed, when a neutrino passes through the Earth, there is a chance, though only a slight one, that it will interact and collide with the particles of which it is made up. When such a collision occurs, another elementary particle – a muon – is generated, following a trajectory based on that of the neutrino. However, upon the change of environment caused when it exits the Earth’s crust, this muon has the specific feature of interacting with water and generating a cone of bluish light known as Cherenkov light, the equivalent of the supersonic bang for light! Captured by a telescope made up of a network of photo-multiplier tubes positioned precisely underwater to avoid any external light pollution, this light thus makes it possible, thanks to the analysis of the angles of the cone of light by the network of sensors, to precisely reconstruct the course of the particle and therefore to precisely locate the source of the neutrino.
The neutrino, as a furtive indicator of some of the least observable cosmic phenomena of our times, thus becomes detectable thanks to the placing of networks of Cherenkov light sensors in the depths of the sea. But how exactly are these complex networks of photo-multiplier tubes to be deployed?

A high precision deployment thanks to Ramses LBL system
It was to this end that iXblue was contacted in 2014 by the Marseille Particle Physics Center (Centre de Physique des Particules de Marseille – CPPM), which is responsible for the deployment of the KM3NeT-Fr facility in French territorial waters, on a site off the coast of Toulon, at a depth of 2,500 meters.
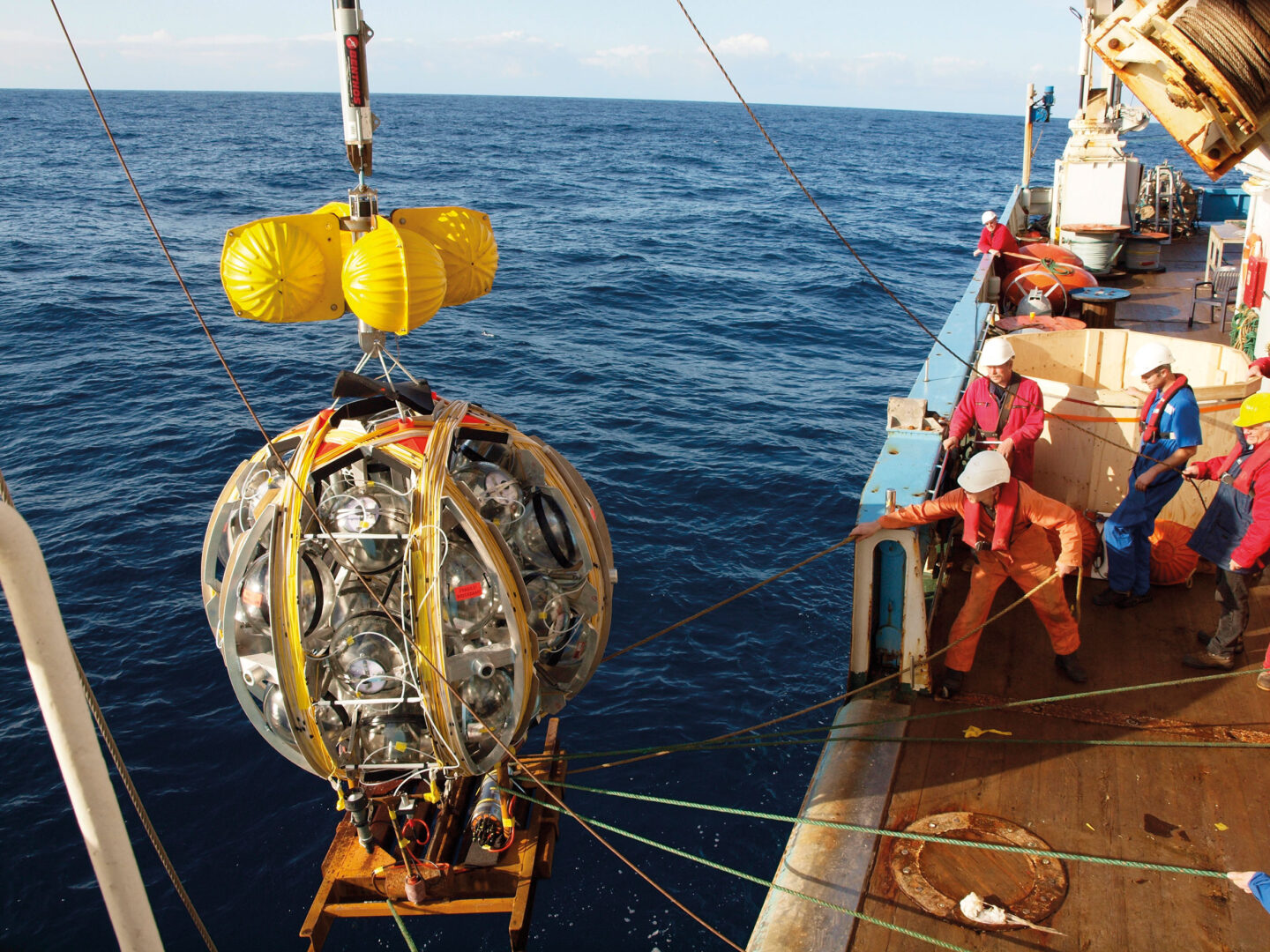
Implementing this telescope, consisting of tens of lines themselves made up of 18 optical module cells, requires a high degree of precision at every step in its deployment. Imagine having to deploy a structure weighing nearly three tons into a 1meter target…from a crane that is as high as 8 Eiffel Towers! A strictly impossible operation without high quality positioning. While this type of operation is performed on land using GPS or laser positioning, water, by its very nature, does not allow for the use of such technologies. Unlike acoustic waves, electromagnetic waves and light propagate extremely poorly in this environment. Designed and developed on its Brest site, iXblue’s range of positioning products is built on several decades of experience in the design of acoustic releases and beacons, and has more recently been expanded to include top-of-the-range positioning equipment such as the Posidonia and Ramses systems. In the call for tenders launched by the CPPM in 2014, it was Ramses, iXblue’s LBL (or “long baseline”) positioning system that was selected for the monitoring of devices and the location of the underwater structures.
iXblue was duly called upon by the CPPM in September 2017 for deploying and calibrating of the reference beacons. Carried out in good weather conditions from iXblue GGIX catamaran, this phase went off without a hitch, thanks to the presence of a support team from iXblue on board. Unusually, for this project, Ramses was installed on the vessel and not on the device to be positioned, though the principle of positioning still remains similar, with vehicles and structures being located using distances to the reference beacons. Ramses was thus coupled to a Hydrins inertial navigation system, which was itself connected to a GPS, so that its position could be known precisely at any moment.
During the course of this mission, the calibration of the reference beacons was performed by Ramses which made a circle on the surface of several hundred meters around each of the beacons to be positioned. While performing this operation, Ramses constantly measured the distance to this beacon, and integrated it into its Kalman filter to determine its exact position in real time. Thanks to the outstanding autonomy of the beacons, with their position now known, these can subsequently be used to position vehicles in the field for several years, without any further intervention being required.
A second mission was then organized ten days later for the installation of the first line of Cherenkov detectors and its associated infrastructure. During this mission, navigation for vehicles within the field was provided thanks to a beacon mounted on the vehicle which responded to queries from Ramses, whilst re-querying all the surrounding reference beacons. The indirect distances measured in this way ultimately enabled Ramses to triangulate the position of the device in the working area. The installation of the tens of lines which go together to make up the submarine telescope was carried out using beacons from iXblue’s Oceano range, which not only enable the lines to be positioned by Ramses during deployment, but which are also used in their handling, from lifting to their release down to a depth of 2,500 meters. All this being possible despite the considerable weight of the line deployment modules (weighing nearly 3 tons). This time, the support team from iXblue and members of the CPPM used vessels from COMEX and Foselev Marine for the mission, which were equipped with ROVs (Remotely Operated Vehicles) and Dynamic positioning (DP) systems enabling them to maintain a perfectly stable position during operations… At least in theory: in fact, in contrast to the calibration phase, only one single structure was able to be deployed this time due to extreme weather conditions, with 30-knot winds pushing the DP system to its limits, and the vessel having trouble to hold its position, but managing to do so all the same.
Despite these difficult operational conditions, Ramses managed to provide excellent positioning, but the driving wind obliged the Manager of Operations to postpone the lowering into the water of the first line and of the CNRS’s oceanographic acquisition module. A third mission was organized several days later, in the first window of favorable weather. The two vessels, JANUS and CASTOR, then worked for several days (and nights!) at a distance of just a few meters from each other with equipment connected below the surface, a deep casting winch deployed and a ROV operating at the same time at a depth of 2,500 meters below the surface. A painstaking operation which put all the know-how of the respective captains and crews to the test.
Under such conditions, positioning the equipment on the seabed is of crucial importance. Ramses thus provided invaluable assistance by enabling the line of detectors to be deployed into its exact position within a “target box” of just 3 meters radius in size. Evaluated based on data recorded during the mission, then reprocessed after operations were complete, the accuracy of positioning of the line during the deployment was brought to within barely 10 to 30 cm.
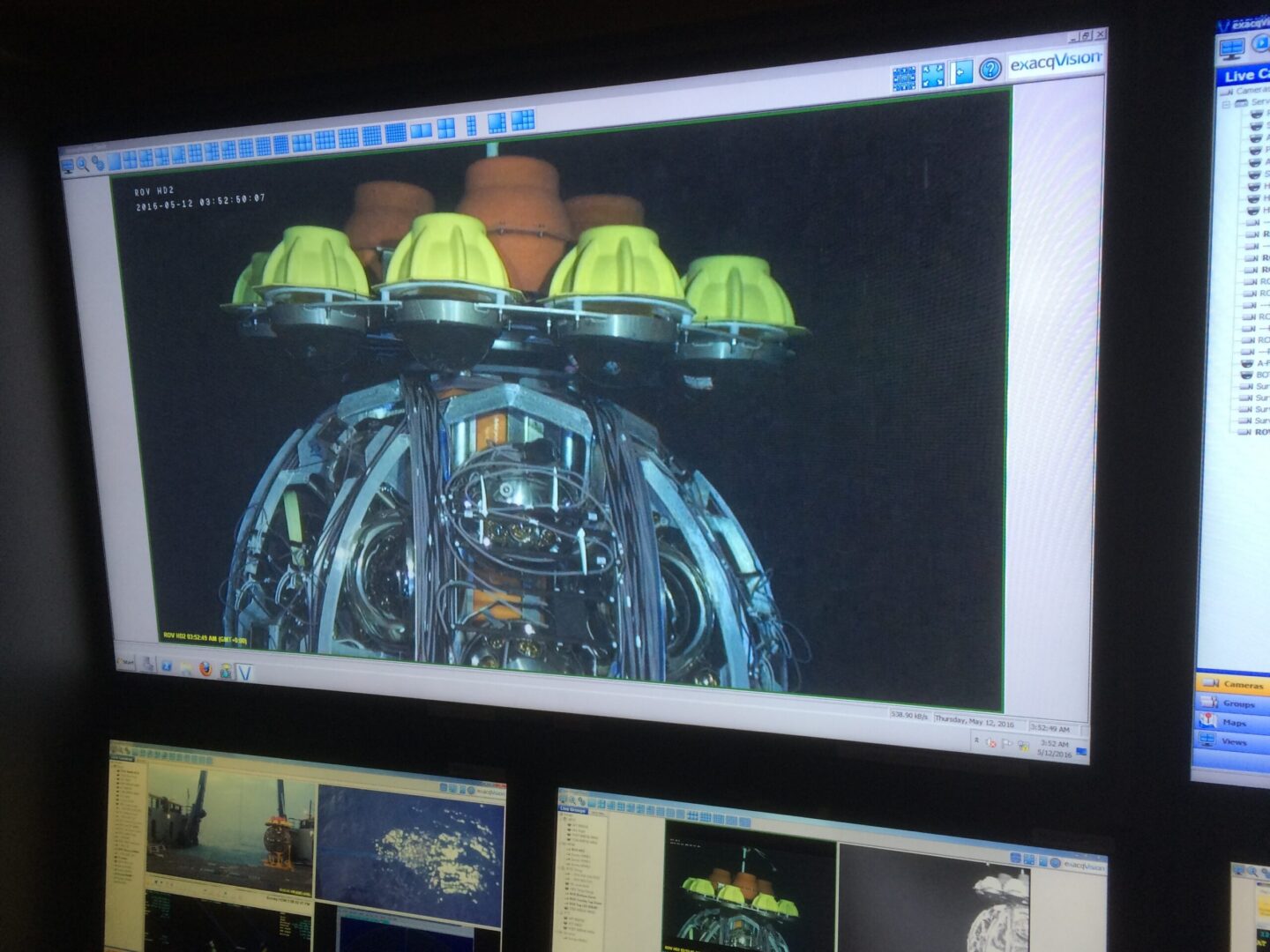
The critical moment of the release and then connection of the first line then followed. All the teams from the CPPM and the CNRS gathered around to watch the video streams transmitted from the ROV. COMEX took responsibility for carrying out these delicate steps.
First, the release: all the sensors are rolled out on the seabed and positioned on the line. This is a magical moment. The neutrino detectors, which are tightly wound around a round structure, deploy themselves before the very eyes of the team present. The ROV lowers its headlamps so as not to damage the ultra-sensitive sensors and moves back up the line. Everyone counts the sensors, they are all in position.
Then comes the connection: it took several attempts and all COMEX’s experience to position the connector at a depth of 2,500 meters.
Finally, the teams from the CNRS and the CPPM establish contact with the station on land to coordinate the powering up of the line, and the sensors are ready to record their first neutrinos.
So, on Friday September 22, 2017 at 10:20 pm local time, after the deployment operations were complete and just 20 minutes after the first optical sensors were connected, the system was already detecting its first rays of cosmic muons… The heavens had been heard from the depths of the abyss: a whole host of know-how deployed to listen to the universe!


