Delph Subsea Positioning, innovative Software Suite for Subsea positioning
Improving operational efficiency is a recurring challenge for subsea operations. Throughout the life of a field, from construction up to decommissioning, several subsea vehicles will be deployed to cover various tasks such as pipeline and structure installation, maintenance or repair. An ROV or AUV assigned to a specific task will require multiple positioning sensors (LBL, USBL,INS…) to complete its mission. Defining the “good enough” subsea positioning strategy, i.e. to ensure a minimum accuracy without compromise on safety, can be a complex exercise. For instance, an overestimation of the LBL transponders required will directly induce vessel time and finally costly operations. On the other hand, a certain level of positioning redundancy may be requested for a vehicle operating close to a subsea asset in production.
To ease the design and monitoring of a subsea vehicle navigation, iXblue has developed an integrated solution. Not only has the company broadened its product range with the new intelligent Canopus LBL Transponder and the new generation Ramses transceiver, but with Delph Subsea Positioning Software, iXblue now provides a complete integrated solution for subsea positioning that goes a step further by bringing significant efficiency. Divided in 4 modules (LBL Array Planning, Navigation Simulation, Operations, Post-Processing) with an intuitive user interface, Delph Subsea Positioning (DSP) is an integrated software suite for the preparation, the operation and the post-processing of iXblue positioning devices (USBL, LBL and INS).
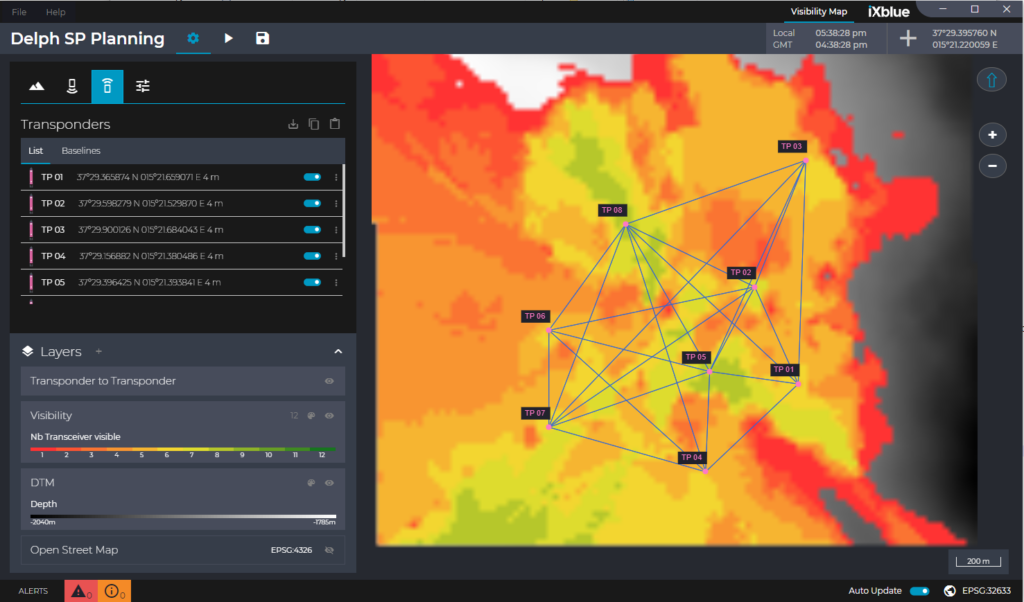
LBL ARRAY PLANNING MODULE
Deciding on the exact number of transponders to be deployed on the seabed and their location is critical to the success of LBL Jobs. Therefore, careful and efficient planning is key. Dedicated to the preparation of LBL missions, the LBL Array Planning module analyses acoustic propagation by taking into account the Digital Terrain Model and the Sound Velocity Profile. It produces real-time visibility map for a transceiver navigating in an array of transponders by estimating the acoustic coverage of each transponder. It also checks for baselines and acoustic line of sights between transponders.
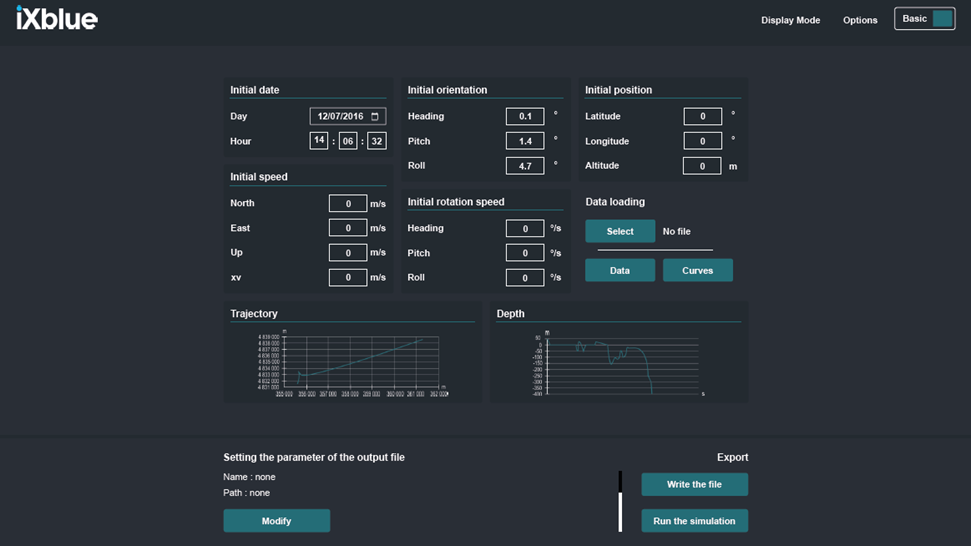
NAVIGATION SIMULATION MODULE
This second brick of the software enables to simulate a trajectory of a subsea vehicle and generate associated synthetic inertial and acoustic data. This data can then be post-processed, using Delph INS, to visualize what would be the performance of the navigation. Thus, by using this new simulation module, the operator can simulate the trajectory, visualise the ROV or AUV movement along this trajectory and depending on the level of accuracy required adapt the number of transponders to be deployed and their precise location. This allows a better planning and mitigate the risk for navigation errors during deployment and operation time.
This navigation Simulation Module is a game changer for ROV/AUV manufacturer and operators. Indeed, by simulating an infinite amount of navigation patterns and external sensors availability variation, it reduces the amount of sea trials required for instance for subsea vehicle’s qualification and thus allows for significant cost savings.
OPERATIONS MODULE
Once the planning and navigation simulation steps are completed, the operators know how many transponders are needed, their precise location and the optimum navigation pattern. They can then start deploying the beacons. During the deployment of the complete positioning solution on the vessel and on the vehicles, the Operation Module of DSP software controls and commands the various iXblue equipment in a unique interface. It supervises all the operations, from equipment configuration, calibration tasks, standard positioning jobs to specific telemetry operations and the monitoring of the tracking. For the calibration of LBL arrays, the Operation Module runs state-of-the-art algorithms and produces automatic calibration reports. Calibration may be conducted via traditional GNSS aided box-in, SLAM and/or mutual array calibration methods.

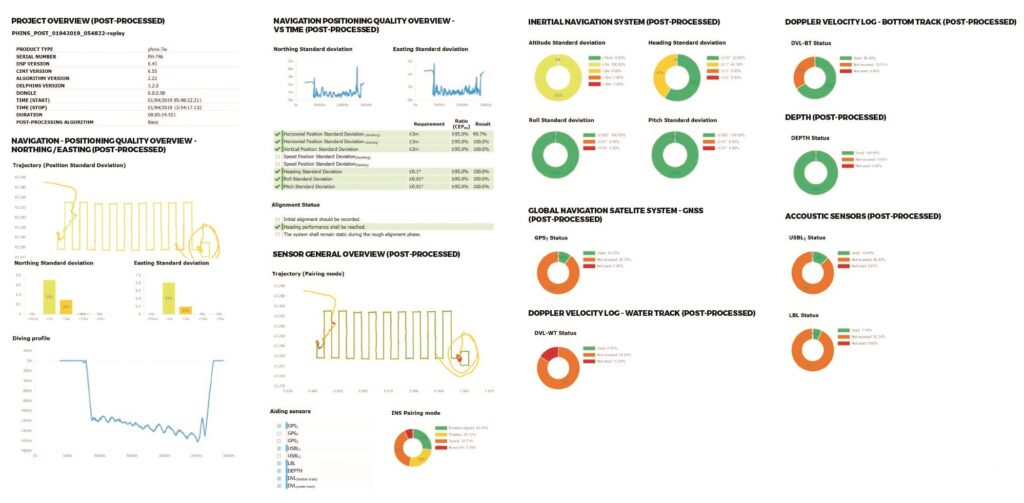
POST-PROCESSING MODULE
Finally, DelphINS Subsea is the post processing tool that completes the DSP suite. It takes either real inertial data or data generated by the Navigation Simulation module and runs Inertial Navigation System algorithms to provide statistics and status all along the navigation (or simulated navigation). It also generates automatic report regarding the navigation of the vehicle. Strong data management, highly intuitive visualisation, editing and processing features together with diverse export capabilities make DelphINS Subsea ideal for quick and easy navigation enhancements. By combining the raw data from the INS and from the complementary aiding sensors (GNSS, USBL/LBL, DVL, depth sensor…) during post-processing, DelphINS Subsea provides higher accuracy for the position, velocity or attitude of the vehicle. The module also produces new comprehensive quality analysis and quality check reports (QA/QC), providing quick, easy and highly intelligible information on the reliability of the collected data.
Intuitive and user-friendly, each module of the DSP software suite has been designed to make each step of the subsea positioning operation simpler, error-free and faster, saving vessel and man time. With Canopus transponder, Ramses transceiver and this new integrated software suite, iXblue’s subsea positioning and navigation offer is truly enhanced, providing substantial efficiency and reliability to customers.
More info about the software HERE


