Sparse-LBL: a cost efficient and flexible solution for enhanced subsea autonomy

Nowadays, various positioning techniques are available for companies and institutes that need valuable navigation information to operate undersea. And while LBL usually remains the preferred solution for the highly accurate positioning of ROVs and AUVs, this method remains costly as it requires the use of many transponders to produce a single position. Operators are thus now looking for new ways that are more efficient, flexible and less costly to conduct their operations. To do so, they can now rely on sparse-LBL, a method that uses the INS equipping subsea vehicles, and that achieves similar or better performance than traditional LBL, while using less transponders. This is indeed made possible by fixing potential INS drift using the measured ranges to the seabed transponders while at the same time filtering acoustic ranges using INS data. This method, that brings increased performance and flexibility, and that reduces deployment costs, has recently been used and evaluated by the Ifremer oceanographic institute, using iXblueu2019s new Canopus LBL subsea positioning solution.

Canopus integration on an Ifremer AUV

Ifremer vessel “Europe” |

Integration of Ramses on Ifremer vehicle “IdefX” |
French oceanographic institute Ifremer recently tested the complete Canopus solution and deployed their “IdefX” AUV from the Europe vessel in the Mediterranean Sea. Conducted in water depth between 1,300 and 1,700 m, those sea trials aimed at evaluating the level of accuracy that could be reached for the navigation of the AUV with only two transponders deployed within a 16 km2 area.
iXblue’s Canopus solution made use of an INS (Inertial Navigation System), a Ramses transceiver and a DVL (Doppler Velocity Log) mounted within the subsea vehicle. It also made use of the dedicated Canopus transponders, deployed on the seabed and regularly interrogated by the Ramses transceiver
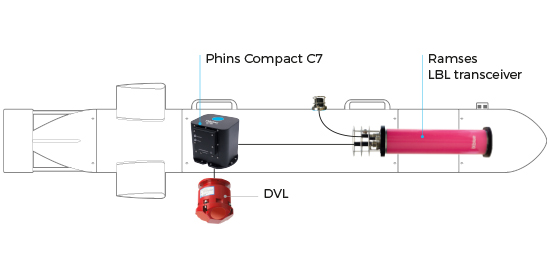
Within this system, iXblue’s Phins INS was at the core of the positioning system. Its role was to gather all measurements (mainly speeds from the DVL and ranges from Ramses to fixed calibrated transponders), merge them with its internal sensor (gyroscopes and accelerometers) and deliver the optimal real time navigation information. The Canopus transponders used were the latest generation of iXblue smart seabed transponders, with long lasting listening and pinging capability, embedded environmental sensors and storage, acoustic modem and WIFI features.
Operating scenario
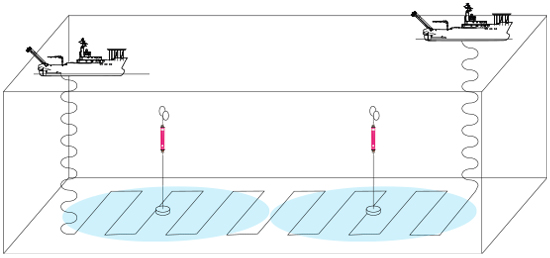
The Ifremer purpose was to navigate in the largest possible area using a minimum of transponders, while ensuring a high level of positioning accuracy. For these tests, two Canopus transponders were deployed and calibrated, covering a 2 km × 8 km area. Thanks to vertical acoustic propagation, the AUV was able to detect the closest seabed transponder as soon as it started diving and helped the INS navigation. Once the sea bottom reached, the AUV started a preprogrammed survey while maintaining a constant altitude above the seabed. During the whole trajectory, the Ramses transceiver within the AUV detected at least one transponder and a single range aiding navigation was performed.
Calibration of seabed fixed transponders and navigation in the field of fixed transponders
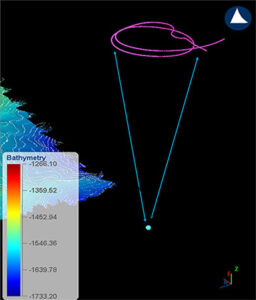
In the same way as with the available positioning modes, Canopus offers great flexibility for the method used for transponder calibration. Both SLAM and LMS (Least Mean Square) based techniques are indeed available, and calibration may be conducted using either iXblue’s Gaps USBL system, or Ramses transceiver, as the acoustic interface to the array. If available, inter-beacon ranges are employed and the calibration may be conducted from a surface vessel or a subsea vehicle. For these trials, the Ifremer chose to use Gaps USBL system to perform the box-in operation. The surface vessel thus circled the transponder location in real time and the Ramses transceiver measured the range to the Canopus transponder and used a LMS, reporting the results and giving an estimate of quality (standard deviation and residuals).(Figure 1.)
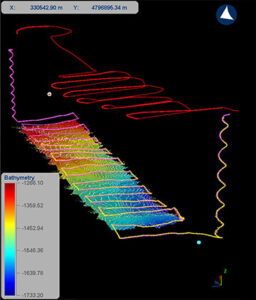
Once calibration of the transponder was done, the AUV was deployed and started its mission. During the survey, the AUV was furthermore tracked from the surface vessel using a Gaps USBL system. After the dive, the direct comparison between USBL tracking and embedded INS/sparse-LBL/ DVL navigation could be performed and showed extremely good results. The positionings estimated in the AUV being much more precise than USBL and overall absolute positioning accuracy was estimated around 1 m.(Figure 2.)
|
|
|