iXAtom joint laboratory

iXAtom – joint laboratory between iXblue and LP2N lab on Inertial Guidance and Navigation using Cold Atoms
The joint laboratory iXAtom brings together the knowledge of the French company iXblue—experts in optical gyroscopes, photonics and inertial navigation—and personnel from LP2N Lab (Photonics, Numerical and Nanosciences Laboratory, CNRS/IOGS/Univ. Bordeaux) specialized in atom interferometry. The aim of this collaboration is to make technological advances using cold atoms to develop the next generation of inertial sensors for industrial, military and space applications, with anticipated improvements in their performance.

In the near future, the development of a compact gyroscope and a three-axis accelerometer based on new techniques in atom interferometry is planned. The ultimate goal of iXAtom is to build a new autonomous device which can compete with technologies based on global positioning systems without the drawback of external communication for recalibration.
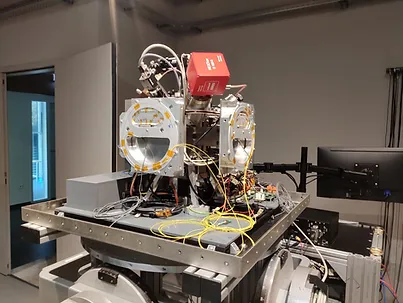
Experimental Setup
Cold-Atom Accelerometer
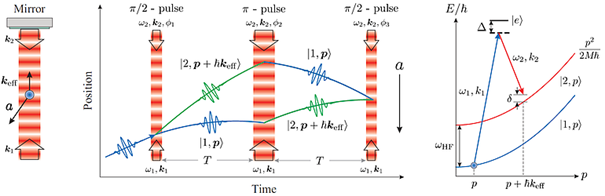
The quantum accelerometer used at iXAtom is based on cold 87-rubidium atom interferometer and velocity-sensitive Raman transitions.
A 3D magneto-optical trap is loaded from background vapor and the cloud is then cooled to a few micro-Kelvin using standard optical molasses techniques. Atoms are prepared in a single internal state and are interrogated by Raman beams in a Mach-Zehnder interferometer during free fall. The population of the internal states is probed by resonant fluorescence. The resulting interference fringes exhibit a phase shift that depends on the acceleration a of the atoms relative to the mirror, and scales as the square of the interrogation time T.
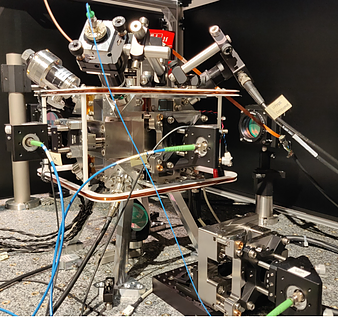
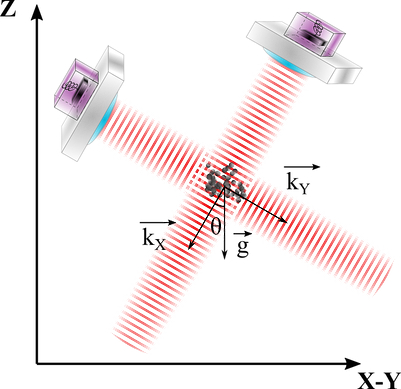
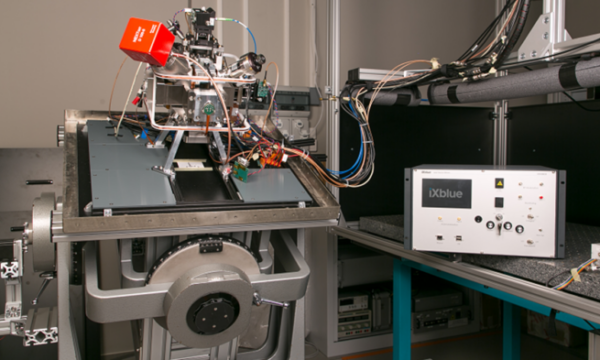
Sensor Head
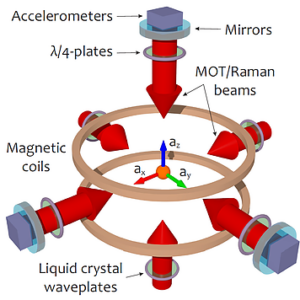
Compact and robust systems are crucial for onboard applications such as inertial navigation. A field-deployable sensor head with a compact form factor designed for multi-axis accelerometry has already been constructed.
A retro-reflected beam geometry allows to form phase gratings for counter-propagating Raman transitions along each axis. These beams are controlled in polarization with liquid crystal waveplates. Classical accelerometers, which are fixed to the rear of the mirrors, are used to correct for vibrations and to form a hybrid sensor.
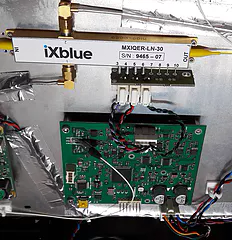
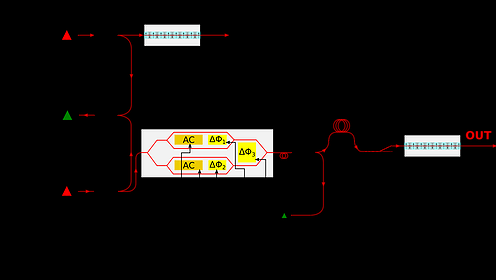
Laser Source
The laser architecture used at iXAtom, which utilizes telecom components for their robustness and reliability, combines an all-fibered IQ modulator operating at 1560 nm and a wavelength conversion module to 780 nm.
Using carrier-suppressed dual single-sideband (CS-DSSB) modulation, the IQ modulator generates two optical sidebands that can be independently controlled in frequency, phase and power. The full performance and utility of modern RF sources can then be transferred to the optical signal using electro-optic modulation. Compared to standard phase modulators, this architecture presents strong attenuation of lines that generates parasitic Raman transitions and avoids additional acceleration bias.

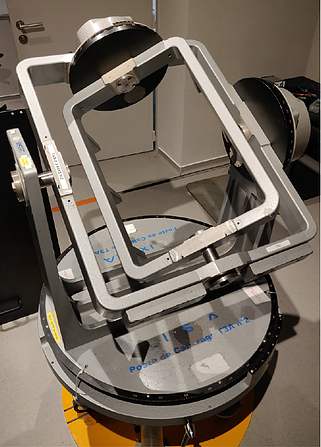
Three-Axis Rotation Platform
A three-axis rotation table was recently acquired, which allows to tilt the experiment. This table will enable to perform sequential multi-axis measurements in different orientations, test various systematic effects, and take steps toward trully mobile implementations of the prototype.
Fiber-Optics Gyroscopes
For mobile operation of the hybrid accelerometer, it is crucial to compensate for rotations of the sensor head which easily prevent any measurement to be performed. Indeed, due to linear free-fall trajectory of the atomic clouds, a rotation of the reference frame would cause a bad overlapping of the wavepackets in the interferometer.
For this purpose, low-noise, high dynamic range and sensitivity Fiber-Optics Gyroscopes (FOGs) were installed along with high bandwidth, precision and stability piezo tip-tilt platforms. The FOGs ensure a continuous measurement of rotation rates along the 3 measurement axes which, once integrated and converted into a relevant signal, drive the tip-tilt stages. The goal is to correct the alignment of the reference mirror in real time during the interferometer in order to prevent the contrast loss, which is the main issue with undergoing rotations while performing cold atom inertial sensing. Additionally, rotations measurements provide knowledge of Coriolis accelerations and authorize to feedback it onto the laser phase in real time, to ultimately track the central atomic fringe.
Recent news
-
 10 Nov 2022
10 Nov 2022- Photonics & Space
First 3-axis quantum inertial sensor: an important step towards drift-free navigation systems
Exail, formerly iXblue, announced the demonstration of the 3-axis quantum inertial sensor developed within the iXAtom joint laboratory, a research team shared with the LP2N…Learn more -
7 May 2019
- Photonics & Space
ModBox CS-SSB: the agile iXblue laser source for cold atoms accelerometers
iXblue has invested in the most advanced technologies for inertial navigation—most recently in the field of cold-atom physics, which has emerged as a potential breakthrough…Learn more

Publications
-
Tracking the vector acceleration with a hybrid quantum accelerometer triad
Science Advances Vol 8, Issue 45 (2022)
https://www.science.org/doi/10.1126/sciadv.add3854 -
Carrier-suppressed multiple-single-sideband laser source for atom cooling and interferometry
Phys. Rev. Applied 16, 044018
https://doi.org/10.1103/PhysRevApplied.16.044018 -
Multi-dimensional atom optics and interferometry
Phys. Rev. Letters 122, 043604 (2019)
https://doi.org/10.1103/PhysRevLett.122.043604 Link arXiv -
Multi-dimensional atom optics and interferometry, Navigation-compatible hybrid quantum accelerometer using Kalman filter
Phys. Rev. Applied 10, 034030 (2018)
https://doi.org/10.1103/PhysRevApplied.10.034030 Link arXiv -
Development of compact cold-atom sensors for inertial navigation
Proceedings of SPIE Quantum Optics 9900, 990004 (2016)
https://doi.org/10.1117/12.2228351 Link arXiv -
Inertial quantum sensors using light and matter
Phys. Scr. 91, 053006 (2016)
https://iopscience.iop.org/article/10.1088/0031-8949/91/5/053006 Link arXiv