Geophysical Software
Get more information with
Philippe Alain
Product Manager
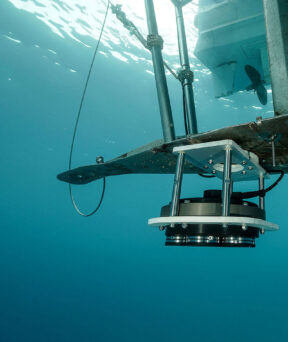
Delph Geo Software is a complete software solution with Seismic, Sonar and magnetometer modules covering all survey needs from data acquisition to processing and data interpretation. Interfacing with most industry leading sensors and data formats, Delph Geo latest generation results from key-users input and the strong experience of iXblue engineers.
Smart and intuitive software for all sensors data
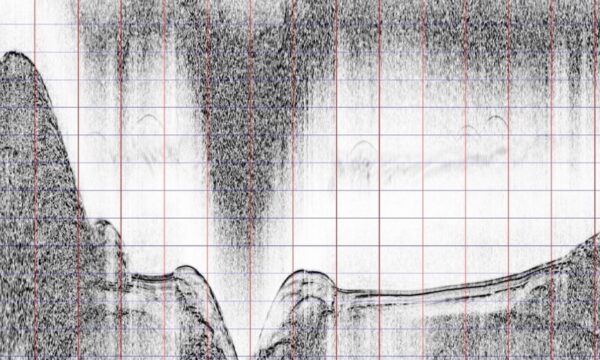
Delph Geo Seismic module
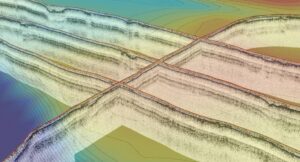
Delph Seismic is the most complete acquisition, processing and interpretation software package designed to provide geologists and geophysicists with an easy access to all data collected from high-resolution seismic systems and sub-bottom profilers.
Delph Seismic is the ideal solution for use in all types of surveys, from scientific research to hydrography, dredging, the energy market, archaeology and more.
For single to 2D multi-channel survey, Delph Analog Acquisition unit features a quality and reliable solution for analogic data acquisition.
Delph Geo Magnetometer module
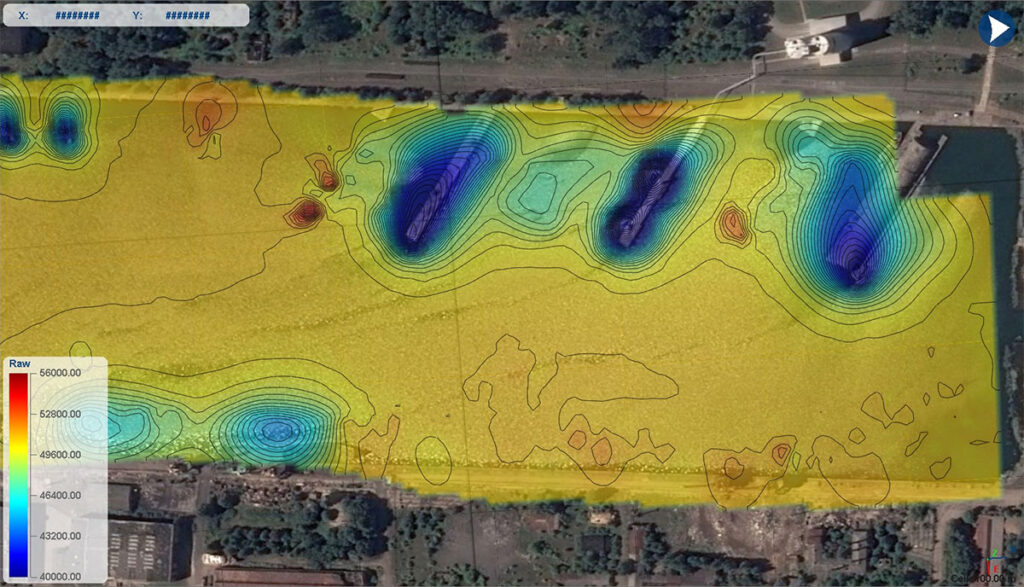
Delph Mag Locator is a unique operational solution for the mapping of buried objects: unlike more specialized magnetometer software Delph Geo filters and maps magnetic anomalies in a few and very comprehensive steps. While not requiring a strong expertise in magnetic science, it quickly delivers very accurate magnetic anomaly maps that will combine in Delph RoadMap 3D view for a powerful correlation with sonar bathymetry and sub-bottom data.
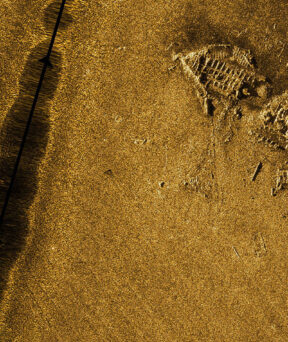
Delph Geo Sonar module
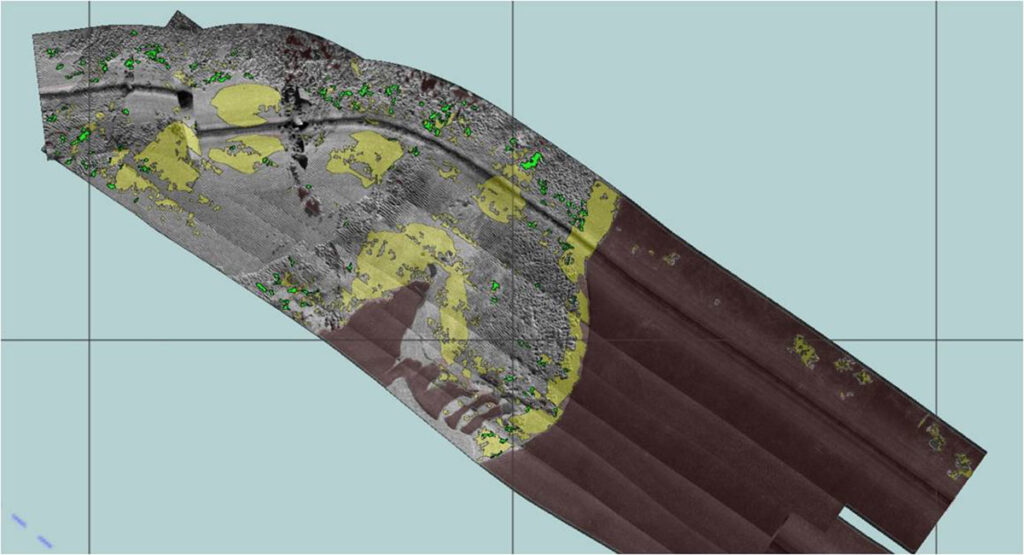
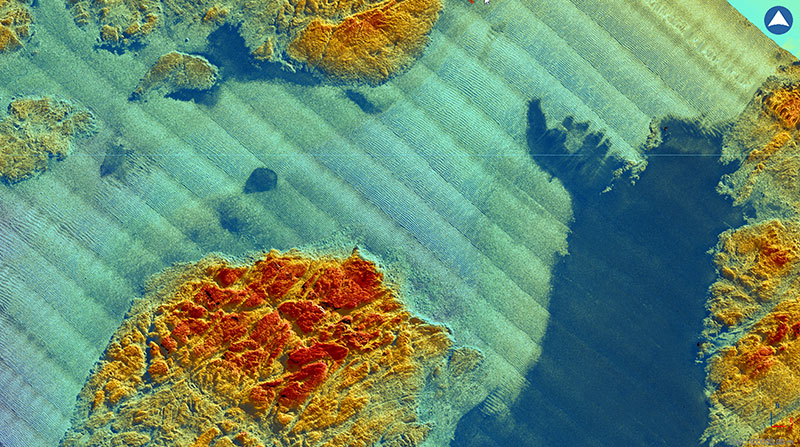
Delph Sonar is a complete acquisition, processing and interpretation software package designed to easily perform and process accurate and productive side-scan sonar surveys. Providing an optimal QC at any stage and relying on Delph powerful workflow and ease-of-use, side-scan sonar mapping has never been so fast. Delph Sonar features powerful tools for seabed classification and target management along with and immediate 3D map correlation with any other geo-referenced data.
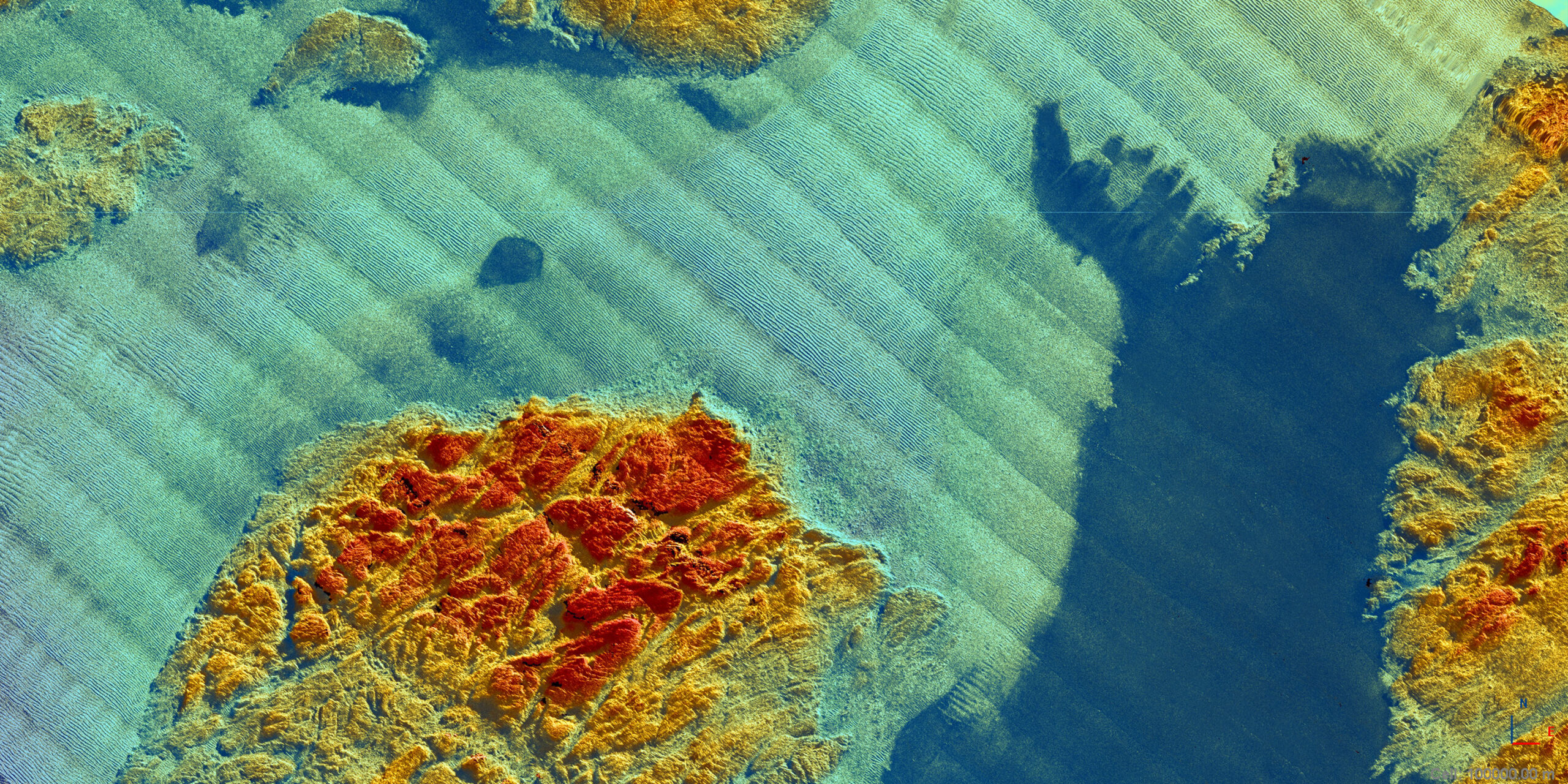
Delph Geo SAS module
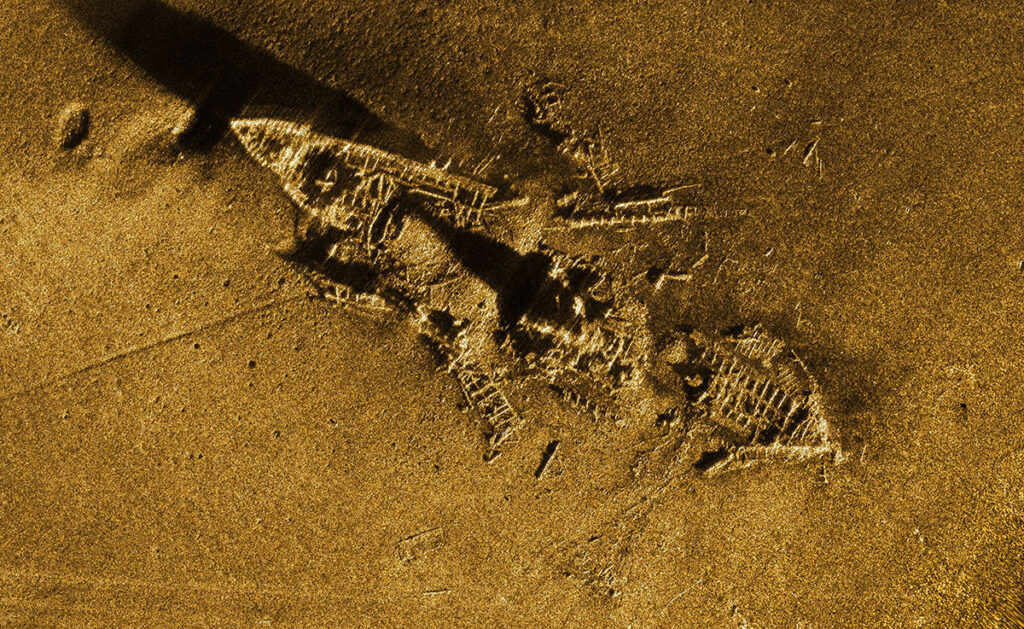
Delph SAS streamlines synthetic aperture sonar processing within the industry leading Delph Sonar Interpretation software. Combined with the iXblue Sams synthetic aperture sonar series, the processing of high-resolution and quality dataset is fully integrated in Delph Geo Sonar module: Sharing the same tools, it is fully similar and even easier to process Sams data than any other legacy side-scan dataset.

News & Customers stories
-
 24 Sep 2019
24 Sep 2019- Maritime
New insights for object detection using iXblue Echoes 10 000
iXblue conducts up to 11 km of near-surface geophysical investigation in shallow water environments (< 25 m) in Scotland shorelines using the Echoes 10 000 (10 kHz).Learn more -
18 Jun 2019
- Maritime
iXblue seismic survey unveils unprecedented images of water resurgence in Walter Munk hometown lake
iXblue conducted a seismic survey using its Echoes 10 000 (10 KHz) sub-bottom profiler in Lake Altaussee, Salzkammergut region (Austrian Alps).Learn more -
17 Jul 2020
- Maritime
Ifremer chooses iXblue’s technology to equip its new 6000-meter AUV
Learn more